A Controller Area Network (CAN) is a type of transceiver that was manufactured for use with the automotive devices and applications, but has now become a household name in the general industrial automations.
This transceiver has one major function and that is to facilitate real-time communication among the Microcontrollers (MCUs). It is also expedient to add here that the CAN transceiver helps in supporting the interconnection or connection of a broad range of large numbers of Electronic Control Units (ECUs), especially in the automotive devices.
However, today, there have been new use cases for the CAN transceiver, ranging from the open communication design for the intelligent devices to the excellent data transmission process.
TCAN332DCN is a CAN transceiver and it offers much more than what we have explained above. In this article, you will discover what makes it unique.
The Interfacing with the CAN FD
The CAN FD is a type of Controller Area Network (CAN) that extends the operations of the TCAN332DCN to a greater extent. It is to this end that the interfacing created between it and the CAN FD goes a long way to ensure the smooth transmission of data.
For emphasis, CAN FD means Controller Area Network with Flexible Data Rate. The flexibility of the data rate is the major feature that allows for real-time, flexible and accurate transmission of data.
It is expedient to point out here that the CAN FD, according to Microcontroller Tips, “is an extension of the CAN bus protocol specified in ISO 11898-1.”
It is this specification that enables the CAN FD to among many other things, enable a dynamic switching of the different data rates in the Electronic Control Units (ECUs).
Besides, the CAN FD also paves the way for the ECUs to make a dynamic switching of the data rates with both the smaller and the larger message sizes.
The Function of the Integrated ESD Contact Discharge
It is an integrated 12 kV IEC-61000-4-2 Electrostatic Discharge (ESD) feature, which offers protection to the TCAN332DCN. The major function is to eliminate the need or the dependency on additional components. It is through this protective mechanism that TCAN332DCN achieves a higher system-centric robustness.
Protective Features

The following are some of the additional protective features making up the TCAN332DCN CAN transceiver:
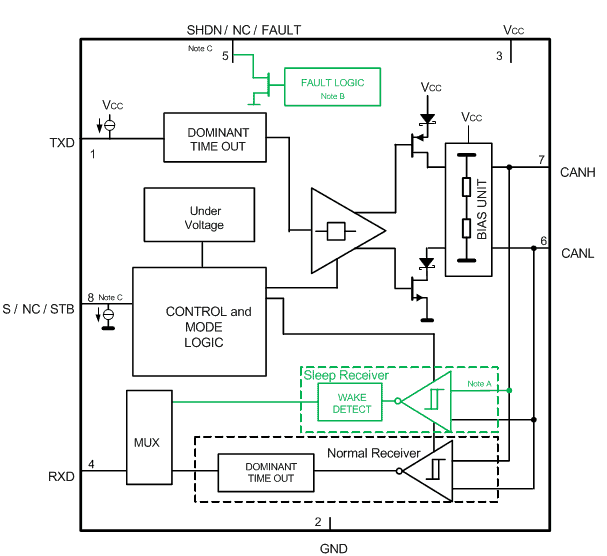
1. Dominant Time Out
The Dominant Time Out or DTO is a protective feature that helps protect TCAN332DCN’s driver. It is divided into the:
- Receiver Dominant Time Out (RXD DTO)
- Driver Dominant Time (TXD DTO)
The TXD DTO becomes active when the TXD has been dominant longer than the tTXD DTO. In this case, it disables TCAN332DCN’s transceiver and sees to the release of the bus lines.
Upon the release, the bus lines become “recessive,” which helps prevent local failure from locking the bus dominant.
A similar working principle is tenable with the RXD DTO, which disables the RXD output after the bus has been dominant longer than the tTXD DTO. To this end, the Receiver Dominant Time Out helps release the RXD pin to the (high) recessive state.
The release of the RXD pin helps to prevent a dominant bus failure from permanently keeping the RXD pin low.
The RXD pin becomes active (automatically) after the bus has been returned to its recessive state.
2. Limited Current Transmission
TCAN332DCN also sees to the limiting of currents, especially on the bus pins. That way, the target devices or applications wouldn’t be exposed to both undervoltage and overvoltage.
3. ESD Protection
The bus terminals are further protected with the Electrostatic Discharge (ESD) function, which extends to cover the following:
- IEC61000-4-2 ESD Contact discharge protection that exceeds ±12 kV.
- HBM ESD Protection that exceeds ±25 kV.
Multiple Operating Modes
You can count on TCAN332DCN if you are looking to design a consumer electronic with different operating modes or channels.
This CAN bus supports three (3) major modes, comprising:
4. Low-Power Standby Mode
This mode keeps the power or current or on a standby operation, especially if it requires a wake function.
5. Normal Mode
The normal mode is applicable to all of the devices and applications (across different industries), which are supported by TCAN332DCN.
6. Shutdown Mode
This type of mode is tenable in the TCAN334 and TCAN330 CAN buses. It is the lowest-power mode of all the supported modes on TCAN332DCN.
It works by first turning off the CAN receiver and the CAN driver. After that, it disables bidirectional CAN communication.
The CAN bus pins are also pulled to the Ground (GND) while it would be impossible to activate a remote wake request through the CAN bus while the shutdown mode is active.
Thermal Protection via Shutdown
Just like the shutdown mode, TCAN332DCN also supports another protective feature called the Thermal Shutdown. It regulates the operations of the junction temperature; taking note of when the temperature exceeds the rated thermal shutdown threshold.
When that happens, the Thermal Shutdown Protection has to block or obstruct the TXD-to-bus transmission path by turning off the CAN driver circuits.
The following are some of the additional modes supported by TCAN332DCN:
- Fault output and silent mode
- Shutdown and standby with wake
- Shutdown and silent modes
TCAN332DCN’s High-Speed CAN Transceiver Design
TCAN332DCN is designed to be a high-speed Controller Area Network (CAN) transceiver. The high-speed design is the major reason why it can connect or create an interface between the CAN protocol controller and the differential bus lines in the CAN.
As much as the high-speed CAN can support up to 1 Mbit/s data rate, it may not be feasible in all cases. For example, the high-speed CAN architecture might have a negative undertone for the overall performance of the transceiver.
The high-speed design might not come in handy for protecting the communications. This is unlike the higher fault-tolerant layout of the low-speed CANs, which ensures that the failure of one of the communication lines doesn’t result in an overall failure of the entire communication protocols/lines.
Final Words on TCAN332DCN
TCAN332DCN is a Controller Area Network (CAN) that tests the transceivers in an application to ensure that the electrical-layer performance and the data lines are in perfect working conditions.
